「ヒューマノイド」大型研究プログラムが立ち上がる…社会実装へ問われること|ニュースイッチ by 日刊工業新聞社
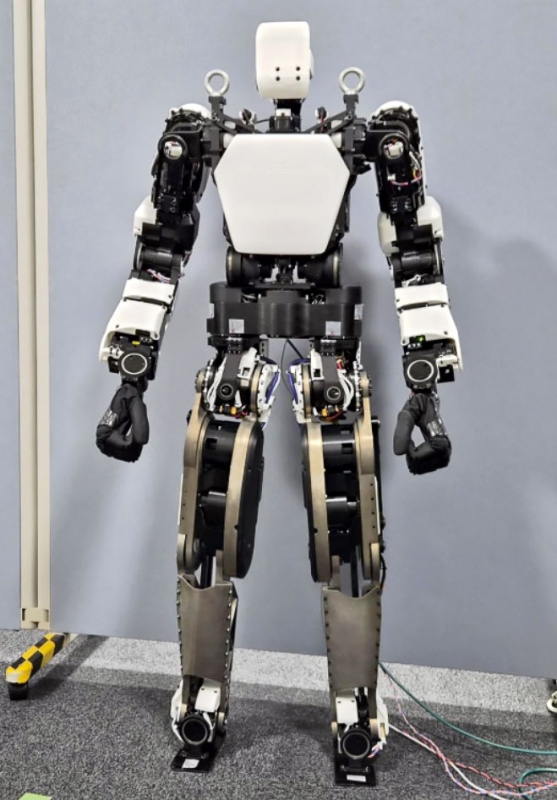
ヒューマノイド(ヒト型)ロボットの大型研究プログラムが立ち上がる。内閣府の「ムーンショット型研究開発制度」として、2050年にあらゆる状況に対応する自律型ヒューマノイドの実現を目指す。機体構築の統合研究からAI(人工知能)の要素研究まで大小14本のポートフォリオを組み、精鋭をそろえた。長期を見据えた基礎研究を始めるが、問われるのは社会の忍耐力だ。目の前の実用化競争は官民で別の事業を用意し、技術と人材を粘り強く育てる必要がある。また現在の開発手法では作業品質や安全性の保証が難しい。普及を目指すなら契約の概念自体も拡張する必要がある。(編集委員・小寺貴之)
要素研究と現場実証を並走
「研究ポートフォリオは最高の構成といえる。ただ予算や期間は限られる。走りながら変えていく」。ムーンショットでヒューマノイド研究のプログラムディレクター(PD)を務める国吉康夫東京大学教授は、研究体制をこう説明する。
特徴は要素技術の開発とヒューマノイドでの実証、ヒューマノイドの開発と現場での実証を並走させる点だ。ヒューマノイドを構築する統合研究を3本、特定分野に特化した専門研究は4本、新規性の高い要素研究を7本と、合計14本の研究計画を採択してポートフォリオを組んだ。
力制御やマルチモーダル(多感覚)統合、プリミティブ(原始動作)生成、メタ学習(学習法の学習)などの技術を開発し、並行開発するヒューマノイドに統合する。
家庭・介護・建設、環境変化が前提
ヒューマノイドは家庭、介護、建設などの現場で実証する。それぞれ東大はトヨタ自動車、早稲田大学に日立製作所や安川電機子会社の東京ロボティクス(東京都文京区)、大阪大学には川田工業などが協力する予定だ。産業界の協力により、信頼性の高い実機開発が可能になったと同時に社会実装への道筋も描ける。
例えば阪大グループは橋梁建設の屋外作業にヒューマノイドを適用する。建設現場では資材の片付けやゴミ出しなどの付帯作業が発生する。一つひとつの頻度は多くないが、多様なため作り込むのは難しい。これを基盤モデルで対応する。阪大の原田研介教授は「現在の基盤モデルは照明が変わると途端にうまくいかなくなる。屋外の環境変化に本当に対応できるかどうかが挑戦になる」と説明する。
ロボット用の基盤モデルとして視覚言語行動モデル(VLA)や世界モデルなどが提案されている。いずれも研究のベンチマークとして多用されるが、論文の結果が再現しないなど、研究者からの評価は必ずしも高くない。また屋外のデモは歩行やダンスなどの全身動作が中心で、道具を扱う例はほぼない。服をたたむなどの手作業は屋内の安定した照明環境でのデモが中心だ。屋外で道具を扱う技術は課題が多い。
そして建設現場は一日の中でも時間や天気によって見え方が変わり、工事が進むにつれて現場自体も変わっていく。同じ環境はない前提で仕事を完遂する力が求められる。
早大グループは介護現場でのおむつ替えをターゲットに据えた。大人の身体を車いすから抱え上げてベッドに移し、おむつを脱がせて便を拭き取る。人形では移乗や拭き取りなど、一つ一つの動作は模倣学習で再現することには成功している。これらを統合して一連の作業を完遂することが目標だ。早大の尾形哲也教授は「工程の長いロングホライズンタスクを実行できるかどうか。被介護者がじっとしてくれるとは限らない。人を傷つけない状況判断が必要」と説明する。
東大グループは家事や引っ越しを対象とする。特徴は言語や身ぶり手ぶり、手取り足取りと多階層の教示をAIで実現する点だ。スポットワーカーのように、初めて来た現場でも5―10分教えたら働けるようにする。まずは言葉で指示し、ダメだったら作業をやってみせる。それでもダメならロボット自体を動かして作業を覚え込ませる。それぞれ言語による行動の理解、他者の動作と行動の理解、自身の動作と行動の理解が求められる。
東大の河原塚健人講師は「まずはVLAや行動基盤モデルなどを片っ端から試す。どの組み合わせで何ができるか網羅的に洗い出す」と説明する。東大グループは参加する研究室主宰者(PI)9人全員が40歳以下の若手だ。各ラボにヒューマノイドを配備し、同じハードウエアとソフトウエアをそろえて検証結果を共有する。開発の速度と物量が突出したグループになる。
安全管理・契約のあり方課題、想定外の動作リスクに対応
課題は品質管理や安全性の保証だ。機械学習を使うと予期せぬ動作を生成する可能性がある。従来は仕事を達成するための要件を定義し、許容範囲を数値に直し、シミュレーションや実機で検証して失敗やリスクが許容できるか検証してきた。これはロボット導入時の契約や合意形成のプロセスに当たる。開発と運用で責任分担を明確にし、失敗や不具合への補償を用意する。
ただヒューマノイドは多様で細かなタスクに適用される。国吉PDは「要件を定義するほどではないタスクをたくさん任せられるのがヒューマノイドの利点」と説く。現状、要件定義をするならそのタスクに特化した専用ロボットの方が費用対効果は高い。
またAI分野では開発元はリスク低減に努め、細かなリスクはユーザーの自己責任となっている。国吉PDは「ロボットは実際に誰かを傷つける。安全を軽視した社会実装は受け入れられない」と指摘する。安全柵で囲うなど、人間とヒューマノイドの働く空間を分けることも可能だが、人間とともに働いて学ぶという学習モデルが成り立たなくなる。
そこで阪大グループはツールチェンジャーとの組み合わせを検討する。当面ヒューマノイドはできるタスクが限定される。機体に搭載したセンサーやアクチュエーターの性能でできるタスクを探して、全身動作やピック&プレースの作業を行っている。典型は下半身が台車のセミヒューマノイドだ。上半身の手作業に絞り込んだ設計となっている。またダンスなどのパフォーマンス向けのヒューマノイドは細かな手作業ができない。カメラやハンドを追加するなど、改造が必要になる。
ツールチェンジャーはタスクに応じてセンサー類を設計できる。品質や安全の管理に必要な機能をツールに集約できれば、ヒューマノイド本体の変更を最少限に抑えられる。阪大の原田教授は「学習による汎用化と設計による最適化のバランスが重要」と強調する。機体とAI、ハードとソフトの両方を統合する設計理論の構築が待たれる。
そして安全管理や契約のあり方にも拡張が求められる。AIの学習で生成される動作は事前に検証しきれない。そのため想定していないリスクについても対応できる合意形成が求められる。これはムーンショットには含まれないテーマだ。そのため「必要なものは連携で補う」(国吉PD)方針で、倫理的・法的・社会的課題(ELSI)研究などとの連携を模索する。
世界では米中ベンチャーの活躍でヒューマノイドの社会実装はもう間近という認識が広がっている。ただ実現するには技術や契約、社会での試行錯誤がまだまだ必要だ。これを支える人材を含めて中長期的に取り組むことが求められる。
関連記事:
マツダ『CX-5』新型、パイオニアの車載クラウド型ナビアプリ「COCCHi」採用

2026-27 シーズン オーセンティックユニフォーム受注販売のお知らせ

